Shape optimization of a cantilever
Shows how to optimize the shape of a cantilever.
Introduction
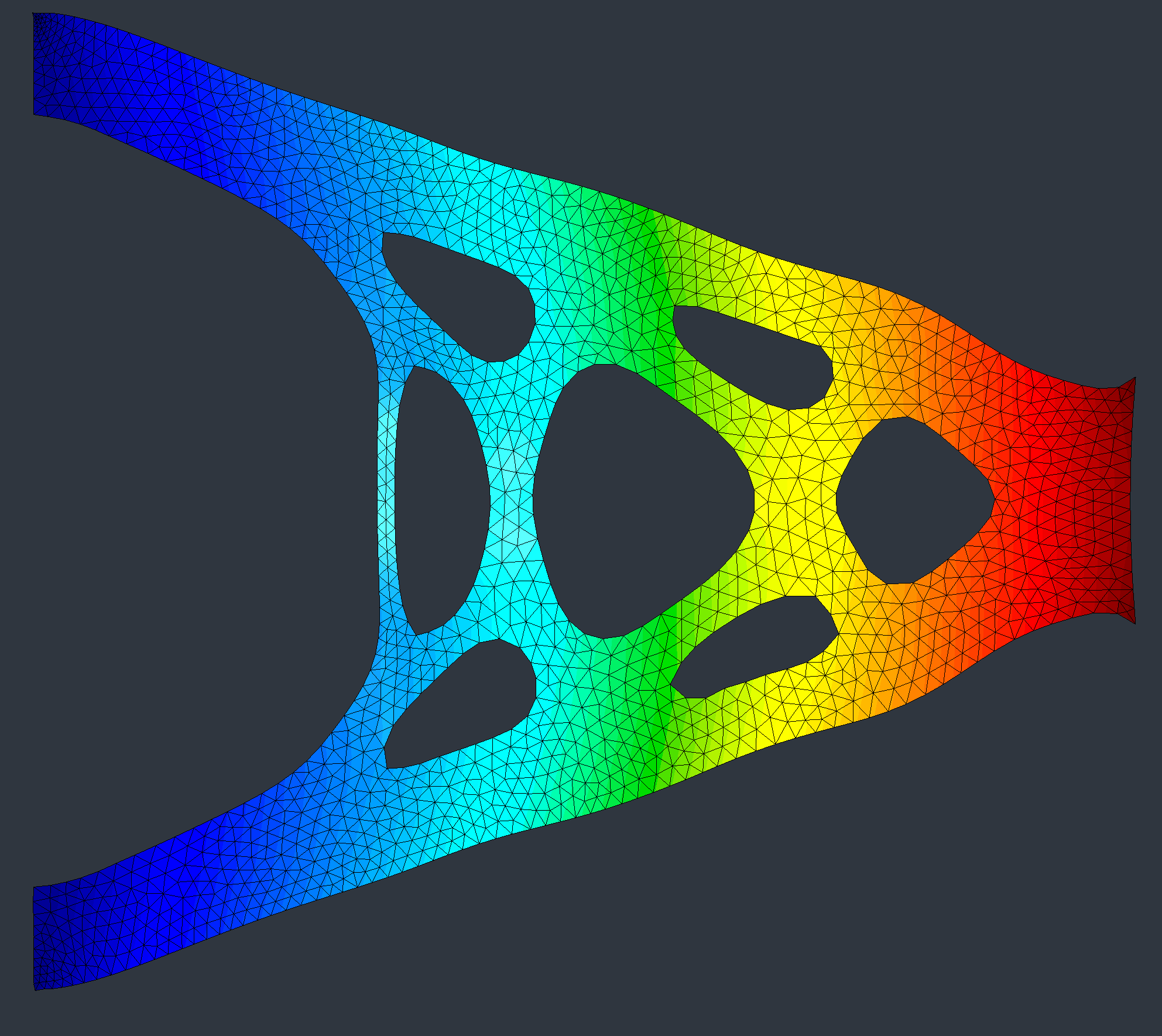
This example performs boundary-variation shape optimization of a 2D cantilever beam. The goal is to find a shape that minimizes the structural compliance (i.e. maximizes stiffness) subject to a volume constraint:
where solves the linearized elasticity system on and is a Lagrange multiplier penalizing the volume.
Problem Setup
Includes
We need the core Rodin modules plus the linear-elasticity helper and the MMG remesher:
#include <Rodin/Solver.h> #include <Rodin/Geometry.h> #include <Rodin/Assembly.h> #include <Rodin/Variational.h> #include <Rodin/Solid.h> #include <Rodin/MMG.h> using namespace Rodin; using namespace Rodin::Geometry; using namespace Rodin::Variational;
Parameters
The boundary is decomposed into three parts:
- : traction-free (the shape boundary to be optimized)
- : clamped (homogeneous Dirichlet)
- : loaded (Neumann, downward force)
static constexpr Geometry::Attribute Gamma0 = 1; // Traction-free boundary static constexpr Geometry::Attribute GammaD = 2; // Clamped (Dirichlet) static constexpr Geometry::Attribute GammaN = 3; // Loaded (Neumann) // Lamé coefficients for the material static constexpr Real mu = 0.3846; static constexpr Real lambda = 0.5769; // Optimization parameters static constexpr size_t maxIt = 50; // Max iterations static constexpr Real hmax = 0.1; // Mesh size (max) static constexpr Real hmin = 0.1 * hmax; // Mesh size (min) static constexpr Real ell = 5.0; // Volume penalty static constexpr Real alpha = 4 * hmax; // Regularization
Loading the Mesh
The initial cantilever mesh is loaded from an MFEM file using the MMG::
MMG::Mesh Omega; Omega.load(meshFile, IO::FileFormat::MFEM);
Optimization Loop
Each iteration consists of four steps:
- Solve the state equation (linearized elasticity)
- Compute the shape gradient via the Hilbert extension-regularization
- Move the mesh along the descent direction
- Remesh the deformed domain with MMG
Step 1 — State Equation
We solve the elasticity problem on the current domain. The LinearElasticityIntegral assembles the bilinear form for the Hooke tensor with Lamé parameters and :
int d = Omega.getSpaceDimension(); P1 sh(Omega); // Scalar P1 space P1 vh(Omega, d); // Vector P1 space (d components) VectorFunction f{0, -1}; // Downward force TrialFunction u(vh); TestFunction v(vh); Problem elasticity(u, v); elasticity = LinearElasticityIntegral(u, v)(lambda, mu) - BoundaryIntegral(f, v).over(GammaN) + DirichletBC(u, VectorFunction{0, 0}).on(GammaD); Solver::SparseLU(elasticity).solve();
Step 2 — Shape Gradient
The shape derivative of the compliance is a boundary integral involving the Cauchy stress tensor . We compute a smooth descent direction using the Hilbert extension-regularization method:
TrialFunction g(vh); TestFunction w(vh); // Strain and stress from the state equation auto e = 0.5 * (Jacobian(u.getSolution()) + Jacobian(u.getSolution()).T()); auto Ae = 2.0 * mu * e + lambda * Trace(e) * IdentityMatrix(d); Problem hilbert(g, w); hilbert = Integral(alpha * Jacobian(g), Jacobian(w)) + Integral(g, w) - BoundaryIntegral(Dot(Ae, e) - ell, Dot(BoundaryNormal(Omega), w)).over(Gamma0) + DirichletBC(g, VectorFunction{0, 0}).on({GammaD, GammaN}); Solver::SparseLU(hilbert).solve();
Step 3 — Mesh Displacement
The descent direction is normalized and the mesh is displaced:
GridFunction norm(sh); norm = Frobenius(dJ); g.getSolution() *= hmin / norm.max(); Omega.displace(g.getSolution());
Step 4 — Remeshing with MMG
After displacing the mesh, we remesh with the MMG::
MMG::Optimizer().setHMax(hmax).setHMin(hmin).optimize(Omega);
Full Source Code
The complete source code is:
See Also
- Linear elasticity — The state equation
- Level-set cantilever — Topology changes via level sets
- Gallery