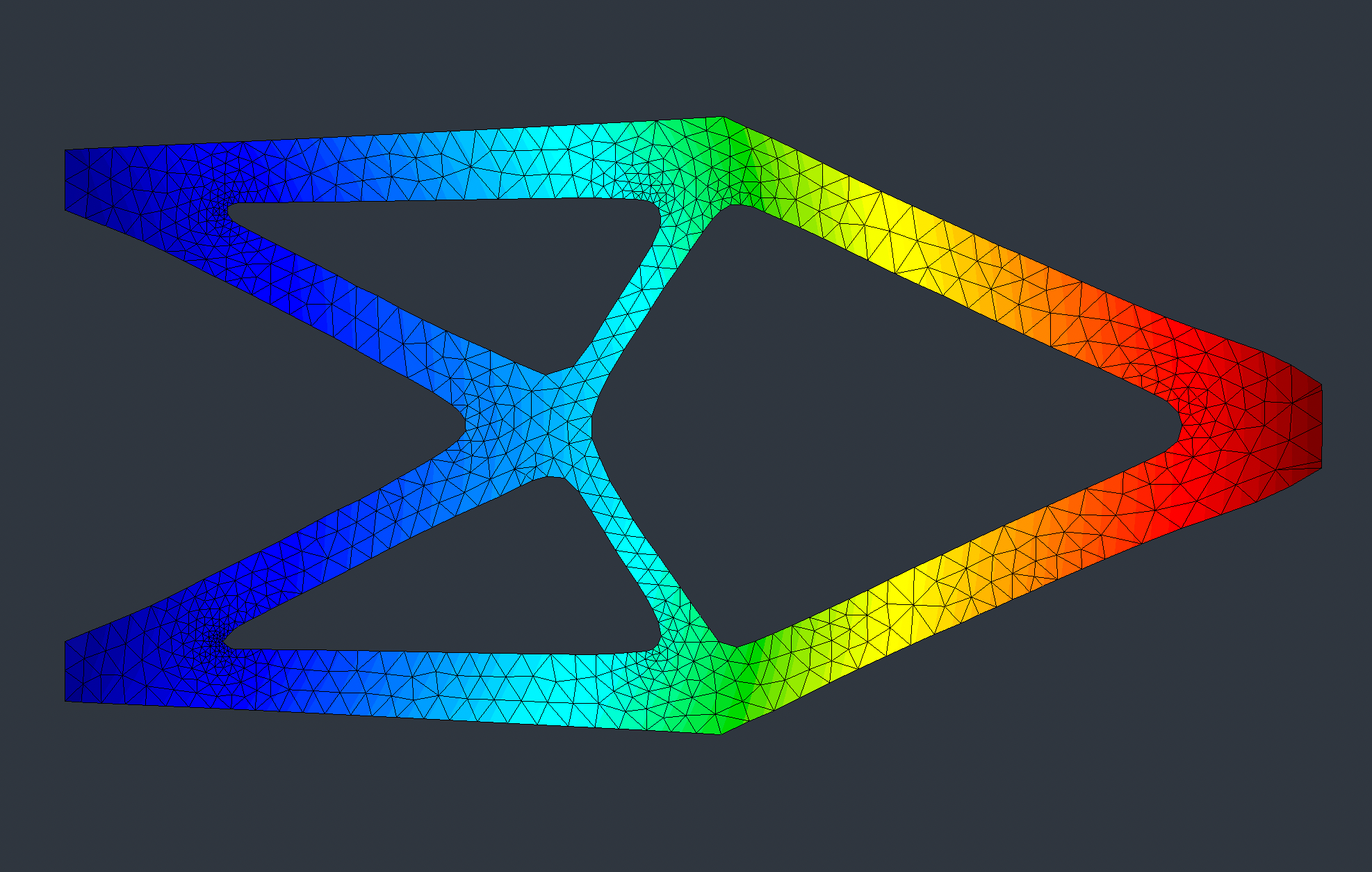
Shape optimization of a cantilever via the level set method
Body-fitted optimization of a cantilever via the level set method.
Introduction
This advanced example combines level-set shape optimization with body-fitted meshing**. Unlike the simple cantilever which only moves the boundary, this algorithm can perform topology changes (create holes, merge components) by advecting a level-set function and recovering the implicit domain at each iteration.
The optimization minimizes compliance subject to a volume constraint:
Problem Setup
Includes
In addition to the standard Rodin modules, we need the Distance module (Eikonal solver) and the Advection module (Lagrangian advection):
#include <Rodin/IO/XDMF.h> #include <Rodin/Advection/Lagrangian.h> #include <Rodin/Distance/Eikonal.h> #include <Rodin/Solver.h> #include <Rodin/Assembly.h> #include <Rodin/Geometry.h> #include <Rodin/Variational.h> #include <Rodin/Solid.h> #include <Rodin/MMG.h> using namespace Rodin; using namespace Rodin::Geometry; using namespace Rodin::Variational;
Parameters
The mesh is partitioned into interior (material present) and exterior (void) regions. The level-set function is positive inside the material and negative outside:
static constexpr Attribute interior = 1, exterior = 2; static constexpr Attribute Gamma0 = 1, GammaD = 2, GammaN = 3, Gamma = 4; static constexpr Real mu = 0.3846, lambda = 0.5769; // Lamé coefficients static size_t maxIt = 300; // Max iterations static Real hmax = 0.05, hmin = 0.005; // Mesh sizes static Real ell = 0.4; // Volume penalty static Real alpha = 0.1; // Regularization
Optimization Loop
Each iteration consists of six steps:
Step 1 — Remesh
At the start of each iteration, we remesh the current domain using MMG::
MMG::Optimizer().setHMax(hmax) .setHMin(hmin) .setHausdorff(hausd) .setAngleDetection(false) .optimize(th);
Step 2 — Trim the Mesh
We extract the interior subdomain by trimming the exterior region. The resulting SubMesh inherits boundary attributes from the parent mesh:
SubMesh trimmed = th.trim(exterior);
Step 3 — Solve the State Equation
We solve the elasticity problem on the trimmed (interior) domain:
P1 vhInt(trimmed, d); TrialFunction u(vhInt); TestFunction v(vhInt); Problem elasticity(u, v); elasticity = LinearElasticityIntegral(u, v)(lambda, mu) - BoundaryIntegral(f, v).over(GammaN) + DirichletBC(u, VectorFunction{0, 0}).on(GammaD); Solver::CG(elasticity).solve();
Step 4 — Shape Gradient
The shape gradient is computed on the full mesh (not trimmed), using traceOf to evaluate quantities from the interior side of the interface :
auto jac = Jacobian(u.getSolution()); jac.traceOf(interior); auto e = 0.5 * (jac + jac.T()); auto Ae = 2.0 * mu * e + lambda * Trace(e) * IdentityMatrix(d); auto n = FaceNormal(th); n.traceOf(interior); TrialFunction g(vh); TestFunction w(vh); Problem hilbert(g, w); hilbert = Integral(alpha * alpha * Jacobian(g), Jacobian(w)) + Integral(g, w) - FaceIntegral(Dot(Ae, e) - ell, Dot(n, w)).over(Gamma) + DirichletBC(g, VectorFunction{0, 0, 0}).on(GammaN); Solver::CG(hilbert).solve();
Step 5 — Advect the Level Set
The signed distance function is first computed by solving the Eikonal equation** . Then it is advected along the descent direction using a Lagrangian advection scheme:
// Compute signed distance GridFunction dist(sh); Distance::Eikonal(dist).setInterior(interior) .setInterface(Gamma) .solve() .sign(); // Advect the level set TrialFunction advect(sh); TestFunction test(sh); Advection::Lagrangian(advect, test, dist, dJ).step(dt);
Step 6 — Recover the Domain
The new domain is recovered by applying the MMG::
th = MMG::LevelSetDiscretizer() .split(interior, {interior, exterior}) .split(exterior, {interior, exterior}) .setRMC(1e-6) .setHMax(hmax).setHMin(hmin).setHausdorff(hausd) .setBoundaryReference(Gamma) .setBaseReferences(GammaD) .discretize(advect.getSolution());
XDMF Output
The XDMF class exports the evolving mesh, distance, and state fields at each iteration for visualization in ParaView:
IO::XDMF xdmf("out/ShapeOptimization"); auto domain = xdmf.grid("domain"); domain.setMesh(th, IO::XDMF::MeshPolicy::Transient); auto state = xdmf.grid("state"); // ... inside loop: domain.add("dist", dist, IO::XDMF::Center::Node); state.setMesh(trimmed, IO::XDMF::MeshPolicy::Transient); state.add("u", u.getSolution(), IO::XDMF::Center::Node); xdmf.write(i).flush();
Full Source Code
The complete source code is:
See Also
- Simple cantilever — Boundary-variation approach
- Linear elasticity
- Gallery